
人間の手は、自然界において最も汎用性のあるツールの1つです。そのため研究者は、その進化的デザインの優位点を新世代のロボットハンドに応用すべく意欲的に取り組んでいます。
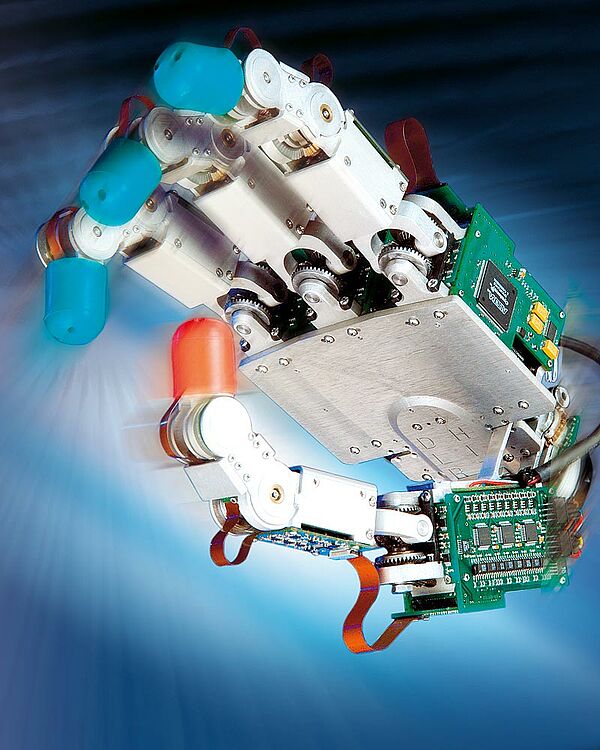
ドイツ航空宇宙研究所(DLR)は中国・ハルビン工業大学(HIT)と連携し、小型アクチュエータと高性能バス技術による人間の手に近いロボットハンドを既に開発しています。人間の手の能力と器用さを備えたロボットハンドを構築するためには、少なくとも4本の指が必要です。すなわち円錐形の部品をつかめるようにするための3本の指と、それを補助するための親指が必要です。新型ロボットハンドは3自由度の関節がそれぞれに4つある3本の指で構成されています。親指として設計された第4の指は4自由度です。言うまでもありませんが、このソリューションによって可能となる多様な動作を実際的な方法で制御し、モニタする必要があります。このような状況において、特に複雑な作業を行う時には高性能な情報チャネルが制御システムにとって不可欠な機能となります。そのため、大量処理に加えて時間が重要な要素となります。このアプリケーション専用にリアルタイムに対応可能な25Mbpsの高速バスが開発され、ロボットハンド本体に組み込まれています。
「神経」のためのバス技術
以前はケーブルで引っ張ってロボットの指を動かしていました。今はマイクロエンジニアリングにより、モータを直接指に組み込むことが可能になりました。この場合、必要な位置と操作データを制御プロセッサに供給します。これが操作全体にとって不可欠な部分であり、アクチュエータの長所を最大限に発揮させる唯一の方法です。指の各関節にはトルクセンサの他に独自に設計した非接触角度センサを備えています。どちらのセンサも極めて高い分解能を必要とするため、要求される大量のデータを転送するためにバスを用いています。セットポイントと実際の値の比較結果を素早くフィードバックすることがフィールド・プログラマブル・ゲート・アレイ(FPGA:Field Programmable Gate Arrays)を用いたシステムにとって極めて重要です。ロボットハンドから制御プロセッサへの外部シリアル接続に必要なリード線はわずか3本です。
実際の制御システムであるプラグインPCIカード上の信号プロセッサが標準PCに組み込まれています。オペレータが容易に操作可能なインターフェースを介してコンピュータから「ハンド」を制御することが可能です。モニタ上にすべてのセンサデータを表示することができます。データ表示、コントロール、およびハンドからコンピュータへの接続は、最初から産業利用を視野に入れて設計されました。「神経」と「頭脳」の他に、「筋肉」も機能的なハンドに力を与えるために必要です。
筋力の代替となる小型アクチュエータ
新型のロボットハンドは非常に複雑なため、それなりにコストがかかります。それぞれの指には個別に制御可能な数台のアクチュエータが必要です。この新型には、ハンド1台にアナログホール センサを含む、12個の電子整流式DCモータ(ECモータ)が使われています。エンジニアのチームは、小型モータのスペシャリストのFAULHABERが開発した要求仕様をすべて満たしているアクチュエータを選びました。このアクチュエータは、実装面積が極めて小さく、性能パッケージ型の安価な市販品です。4本指のロボットハンド用に直径16mmのブラシレスDCサーボモータが選ばれました。このモータを同じ直径のギアシステムに連結して一体型のユニットを形成することができます。このモータには12Vと24Vタイプがあり、2.6mNmまでの最大連続トルクと11Wの出力を備えています。回転方向に変化が生じた場合でも動的応答が良く、また予圧ボールベアリングが制御コマンドに対する正確な応答動作を保証します。標準で取り付けられているアナログホールセンサは正確な位置をコントロールに知らせ、8ビット以上の分解能で必要なフィードバック情報を引き渡します。ホールセンサとモータで、わずか長さ28mm、外径16mm、重さ31gのコンパクトなユニットを形成しています。モータは29,900rpmでアイドリングします。アクチュエータは総金属製の遊星ギアヘッドと連結されています。FAULHABERのこれらの標準製品は「ハンド」内で使用するために高速回転数を下げ、同時にトルクを増強します。ギア比3.7:1から5647:1まで幅広く選択できます。このアプリケーションで使われるギア比は159:1です。したがって許容トルク値は最大450mNmまで増大します。ギアヘッド本体の重量はわずか33gで、全長は29.4mmです。新型HIT-DLRロボットハンドは、バスを経由するフィードバックと高速データ転送を伴うコンパクト アクチュエータの技術によって極めてデリケートかつ精密に制御することができます。このようにマイクロエンジニアリングとマイクロエレクトロニクスは互いに完璧に補完しあっています。標準部品と優れたコンセプトで「武装」して、今や、エンジニアは高価なカスタマイズ コンポーネントを使ってさえも数年前までは考えられなかった製品を製作することができます。