理論通りに動くのであれば、その理論は正しいことになります。これを念頭に、Freiburg大学のAI学部では、異なる状況に反応する新しいソフトウェアの開発に対話型アプローチを選択しました。実地テストは、改善の方向を示す貴重な情報源です。前提条件の中で最も重要で複雑な状況を想定してテストを繰り返し、プログラムからの素早い反応も確認します。そうした明らかに難しい状況でも、わずかに視点を変えるだけで最高のソリューションをすぐに見つけることができます。テーブルサッカーゲームは非常に難しいゲームです。ボールの動きが速く、プレイのパターンが幾通りもあるからです。適切なアクチュエータと早さと複雑さに対応できるコントローラがあれば、様々な自動化タスクに応用できます。
テーブルサッカーロボットのすべての動きは、高さ220×幅157×奥行き121cmのピッチ内で展開されます。操作の複雑さを考えると、これはかなりコンパクトなテスト装置と見なすことができます。AI学部チームはこの分野のスペシャリストとの協力体制により、可能な限りベストな戦略を探しました。駆動のノウハウを提供したのは、マイクロモータの専門メーカーであるFAULHABER社で、装置のシュート力と可動性に不可欠です。ゲーム機の実機は、ゲーム機のハイエンドメーカーとして有名なadp Gauselmann GmbH社が担当しました。
機能の原理
実際にゲームを制御するのはPCです。搭載されたカメラがピッチ内の状況をすべて撮影し、データとしてPCに送信します。カメラの最新画像は20ミリ秒ごとにソフトウェアにより評価され、ボールの位置、速度と方向が特定されます。このデータを元に、プログラムはどの選手をいつ、どのように動かすかを決定します。その結果、水平に並んだバー、(つまり選手)が回転し、選手が首尾よくボールを蹴ったり、ゴールキーパーがボールを止めたりします。
主な目的の1つは、処理するデータ量をできる限り少なくして、評価プロセスの処理を強化することです。最新のデータ収集と動作の配分が最も重要になります。すべての動きは、透明なピッチの下から赤外線カメラで撮影します。装置の縁に沿って約300個の赤外線発光ダイオードが配置され、ピッチ表面は赤外線透過フィルタ膜で覆われています。これにより、カメラはボールに反射した赤外線のみを検出するため、ボールを特定する評価プロセスの処理が速くなります。
さらに、アクチュエータに送られるデータ量も最小限になり、コントローラのPCは「右」、「左」、「シュート」などの上位コマンドのみを指示します。これらのコマンドを実際に微調整するのは下位の制御装置です。テーブルサッカーロボットでは、この部分にFAULHABER社の標準的なモーションコントローラが使用され、DCモータとの連動を最適な状態に調整しています。このゲームの魅力は反応時間が短いことです。そのためにデータセットを見直し、無駄な遅延時間をなくして最短の計算時間を実現しました。


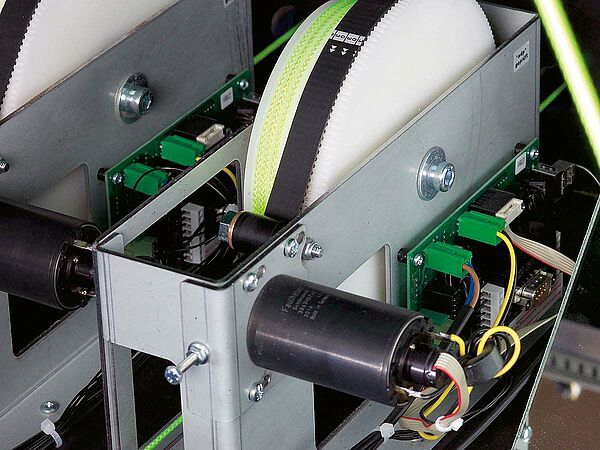
ドライブシュート
Star Kick Robotの選手には、プロのサッカー選手のような破格な報酬は必要ありません。選手のモチベーションは各バーの2台のモータだけです。装置の台板に取り付けられた駆動装置が、バーのワイヤハンドルを介して選手を水平移動させます。各駆動ドラムの周りに巻き付けられたワイヤは、摩擦によって滑り落ちることがありません。これによって、選手の正確な同期制御が可能になります。開発者が、シュート力、すなわち選手の回転の制御に使用したのは、装置の後部にあるベルト駆動装置です。この用途では、モータはほんの一瞬であっても非常にダイナミックに動かなければなりません。そのため、Schönaichに拠点を置く駆動装置の専門メーカーのFAULHABER社は、カーボンブラシ付きDCモータを推奨しました。これらの耐久性に優れたモータは、最大220ワットの電力を出力できます。これは選手を動かすために十分過ぎる出力です。各駆動モータには電磁パルス発生器があり、各選手のポジションをコントローラに伝達しています。
1回転当たり512パルスの非常に高い分解能により、ボールが選手の足をすり抜けることもありません。モータと角運動量を実際に制御するのは各モータのモーションコントローラです。試合開始時に、モーションコントローラは選手を規定のスタートポジションに動かし、速度センサーのデータを評価します。処理されたデータは、RS232インターフェースを介してPCに送信されます。次にPCは、選手のコントロール情報を送信します。この情報はコントローラによって電気パルスに変換され、モータに伝達されます。試合中は、ワイヤプーリーまたはベルトプーリーによって確実に減速できます。変速機は要求される加速値を考慮し、モータが最適な速度範囲で作動するように設計されています。特注の設計と高性能駆動技術の融合が、わずか数年前には想像できなかったソリューションを実現しましたが、現在マイクロドライブの分野で入手できる標準的な製品の精度が向上し、複雑な動作の習得が可能です。必要なのは創造力と技術、そしてそれを支える最先端の駆動システムです。