
彗星(流星)は小惑星と同様に、太陽系創世期の残留物と考えられています。
彗星は極低温の宇宙空間で形成された天体で、通常、核の直径は数キロメートルです。太陽に近づくと、ガスや塵が放出され彗星の核の周囲に「コマ」と呼ばれるぼんやりした部分が形成されます。古来より彗星は人類を魅了してきました。古代のギリシャやローマでは、彗星は神のお告げと信じられていましたが、中世になると悪い事の前触れと恐れられました。今日では、ヨーロッパの科学者が彗星への着陸に初めて成功し、その観察や調査がクローズアップされ、太陽系の起源の解明に注目が集まりました。しかし、こうした試みには高度な技術が求められ、容易ではありません。弾道推進式の着陸機には、コンパクトな一連の駆動装置が使用されていますが、これらの装置は長い宇宙飛行を終えた後に、目的地で確実に機能できなければなりません。たとえば着陸や地表の分析などでが行われている間も、着陸時に備え作動しなければなりません。
3回目で着陸に成功したフィラエ
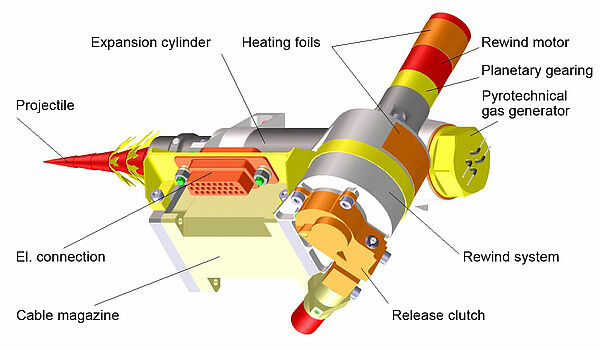
天体の重力は小さいため、その表面での安定した足場の確保や稼働中の安定した姿勢を保つのが困難です。そのため、マックス・プランク地球外物理学研究所(MPE)は、ドイツ航空宇宙センター(DLR)の支援を受け、探査機用の特殊なアンカーシステムを開発しました。このシステムは、着陸機が彗星の表面に接触した瞬間に、発射薬で2本の銛を彗星の表面に打ち込み機体を固定します。これらのアンカーが緩まないように、銛には返しが付いています。さらに銛の発射と同時に取り付けられたケーブルがマガジンから引き出され、機体が地表から離れないようにします。ケーブルは16/7遊星ギアヘッド付ブラシレスサーボモータ1628シリーズによってドラムに巻き取られピンと張り、機体を固定することになっていましたが、実際は銛自体が発射されず、巻き取り機構。は使用されませんでした。「Philae」は固定されない状態で2回のバウンドのあと3回目でようやく着陸を果たし、小型の実験室による解析が開始されました。
着陸装置と試料分析
他のモータには、着陸段階で次のような重要な役割があります。着陸時に発生する運動エネルギー(約50J)を電気エネルギーに変換し、最終的にはスピンドルドライブを使用して熱に変換されます。そのために使用されるのが3557シリーズのベル型のアーマチュアモータで、直接外部抵抗器と接続され発電機として機能します。また、着陸機の3本の着陸装置に取り付けられた1224シリーズの追加の駆動装置は、自在継ぎ手を使用して機体の上部を旋回または回転させます。これによりソーラーパネルの向きを調整することができます。サンプルの採取にも、マイクロドライブが使用されています。着陸機には、彗星の核から取り出したサンプルを熱分解するために小型オーブンに送るドリルがあります。10/1遊星ギアヘッドを搭載した小型モータ1016シリーズが、ウォームドライブを介してカムを駆動させます。カムによってオーブンのセラミック製のブリーチ部分が送り込まれると同時にオーブンの発熱体の電気接点が閉じます。気体はオーブンのラッチの細い管を通って分析器に送られます。着陸機は通算56時間におよぶ最初の探査活動で、計画された彗星表面でのすべての測定を終了し、データをLanderコントロールセンターに送信した後、着陸機が太陽とほぼ一直線になるように、機体の上部を移動させました。受け取ったすべてのデータの分析結果が分かるのはまだ先のことですが、ESAとDLRは、すでにこのミッションは完全に成功したと評価しています。
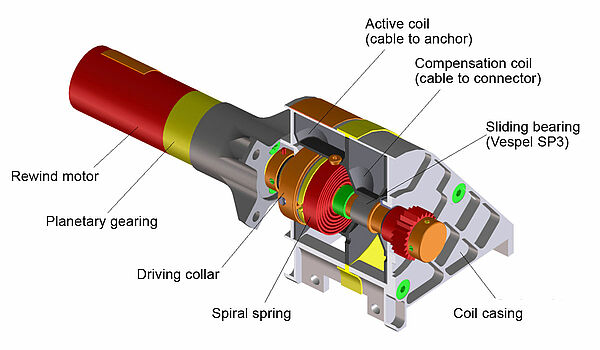
小型モータと渦巻きばねを使用した、柔軟性のあるエネルギー蓄積装置としての巻き取り装置
宇宙空間で要求されるもの
宇宙空間で使用する、これらの駆動装置は厳しいレベルが要求されます。宇宙に打ち上げる物体の重量が増えるごとに、必要な燃料も増加します。その為、キロ単位の増加でも、非常に費用がかかる、小型で軽量なソリューションが求められます。また、離陸時の強烈な振動と加速への対応、さらに長期間の極低温環境と宇宙の真空状態に耐えられなければなりません。
宇宙計画で使用するコンポーネントの選定でも、原価が問題になります。開発者の誰もができれば多額の出費が伴うカスタム開発を避けたいと思っていました。できるだけ多くの仕様に準拠したシリーズ製品を検討したところ、種類が豊富なFAULHABER社のドライブシステム(テキストボックス参照)のラインナップの中に、理想的な製品を見つけました。FAULHABER社から提案された標準的なドライブソリューションは、すべての機械的要求仕様を満たしています。宇宙という特殊環境に対応させることが、追加費用を必要とするような変更を、比較的少なく実現する事ができました。
標準駆動機器の調整
精密ギアヘッド付きブラシレスDCサーボモータは、銛の打ち込み作業の最初のモータとして機能しました。モータとギアヘッドを合わせても、わずか直径16mm、長さ61mmです。ギアの遊びは1°以下であるため、より精度の高い位置決め可能です。これらのコンパクトなサイズによりドライブソリューションへの組み込みも簡単で、消費電力が少ない点もアプリケーションに最適でした。
着陸機の駆動機器の最適化と同様に、駆動機器の潤滑剤も宇宙空間の条件に適応させるために検討されました。グリースやオイルは大気圏外では寒さで固化してしまい、真空状態では蒸発するため、宇宙空間で使用できません。固体潤滑剤として可能性があるグラファイトは、層と層の間に水蒸気や窒素などの気体が蓄積する場合にのみ優れた潤滑性を発揮しますが、真空状態の宇宙ではこれらの気体が存在しないため、潤滑剤として使用できません。地球で使用される固形潤滑剤はチョークのような働きをすることから、二硫化モリブデン(MoS2)が検討されました。MoS2もグラファイト黒鉛と同様に層構造ですが、真空状態や大気圏外の極寒温度はもちろんのこと、数百℃の温度でも固体潤滑剤として使用することができます。潤滑が必要な特別な軸受けと標準の歯車の表面にMoS2が塗布されました。ギアヘッドのハウジングも宇宙空間で使用できるように設計変更が必要でした。閉ざされた環境では、-100℃以下の極端な低温や異なる素材による精密機械の熱膨張が問題になる可能性があります。ギアヘッドの標準的なハウジングはニッケルメッキ仕上げの真鍮が使用されていますが、スチールギアの熱膨張率と差がありすぎるため、ハウジングをギアと同じスチール製に変更することにしました。スチール製のハウジングは、FAULHABER社の通常の生産設備で製造することが可能でした。さらにハウジング以外の他の部品の互換性もFAULHABER社によって、すべて調整されました。ギアヘッドの多くの部品はアッセンブリとして製造されています。各部品を組み付けるだけで宇宙環境に適合した装置が完成します。すでに電子顕微鏡による高真空状態での使用やチップ製造などの特殊な用途で、改良された標準製品の性能が実証されています。今回のミッションでFAULHABER社の駆動装置の性能が、宇宙環境という新たなステージでも実証されました。